Zwerfafvaldetectie met scanauto's (Rotterdam)
Vision-AI op straatbeelden uit gemeentevoertuigen, heatmap van schoonniveau om reinigingsroutes datagedreven te plannen.
- rol
- Engineer, één van de ontwikkelaars
- periode
- 2024/01 → 2025/07
- klant
- Gemeente Rotterdam (via brainstax)
- domein
- publieke-sector
"Het echte werk zit niet in de detectie zelf, maar in class-imbalance, domain shift en validatie tegen de CROW-meetlatten."
Het probleem
Rotterdam wil stadsbreed gemiddeld 90% B-schoonniveau halen volgens de CROW-systematiek (Q1 2025: 90,26%). Tot voor kort waren reinigingsroutes vooral gebaseerd op vaste rondes of reactief op burgermeldingen, niet op data over waar het werkelijk vies is. Tegelijk speelt: beelden van openbaar gebied moeten voldoen aan GDPR.
De aanpak
De bestaande scanauto's van Rotterdam (rood-wit, oorspronkelijk voor parkeerhandhaving via ANPR) hebben elk twaalf camera's. Voor zwerfafvaldetectie wordt dezelfde voertuigvloot voorzien van extra AI-software. Onderdeel van het bredere ORBS-initiatief, Openbare Ruimte Beeldherkenning Service, geleid door Amsterdam, met Utrecht, VNG, UU en HU.
Pipeline:
- Image capture, camera's leggen continu beelden vast tijdens normale routes (parkeercontrole, wijkbeheer)
- Privacy preprocessing, automatische face/plate blur (YOLO/RetinaFace-stijl) vóór opslag. Geen ruwe beelden ergens
- Object detection, CNN (YOLO-familie) op afval-categorieën: zakken, blikjes, peuken, lachgaspatronen, naastplaatsingen bij containers
- Geo-tagging, elke detectie krijgt GPS uit het voertuig
- Aggregatie naar heatmap, binning op straat-/buurt-niveau, dichtheidsgewogen, gevisualiseerd groen → rood
- Dekkingscorrectie, heatmap toont ook welke straten al wel/niet bereden zijn (anders krijg je vertekening: "dit is schoon" vs "hier is nog niemand geweest")
- Planning-dashboard, gebruikt door planners om reinigingsroutes te optimaliseren
Wat het opleverde
Detectie-pipeline operationeel op de Rotterdam scanauto's; aggregatie naar heatmap voor datagedreven reinigingsroutes.
Wat ik specifiek deed
Eén van de ontwikkelaars in het Rotterdam-team. Bijgedragen aan de detection-pipeline en de aggregatie naar bruikbare planning-output. Verder TODO, specifieke focus binnen het team afstemmen.
Wat ik ervan heb meegenomen
De basis-detectie is geen rocket science meer in 2024, pre-trained CNNs op COCO + fine-tuning. Het echte werk zit elders:
- Class imbalance: sigarettenpeuken zijn klein en talrijk, koelkasten groot en zeldzaam. Hoe label je? Hoe weeg je? In de praktijk: aparte modellen of categorieën met aparte drempels.
- Domain shift: een model getraind in zomer presteert slechter in herfst (bladval lijkt op afval). Antea en UrbanVue publiceren hier expliciet over.
- Privacy by design: GDPR-compliance is hier geen bijzaak maar kern-vereiste. Beelden geanonimiseerd vóór opslag, geen boetes op basis van deze beelden (in tegenstelling tot de parkeerscan).
- Validatie tegen CROW: Rotterdam gebruikt al jaren beeldmeetlatten voor schoonniveau. De AI-aanpak moet daarmee correleren om geaccepteerd te worden door operationele planners, een interessant validatieprobleem.
Bronnen
- Algoritmeregister Rotterdam
- Nota Samen SchoonR Actieplan 2025
- ORBS-project (digitaleoverheid.nl)
- Object Detection Kit (ODK)
- TU Delft paper "Contestable Camera Cars" (2023): arxiv.org/pdf/2302.04603
Gerelateerd
- Private GenAI-chatbot bij Gemeente Rotterdam, andere Rotterdam-opdracht in dezelfde periode
- Groene daken in kaart bij Gemeente Rotterdam, andere vision-AI bij Rotterdam
- Skills: Computer vision, Geospatial analyse
Skills, topics & tech
Gerelateerd werk
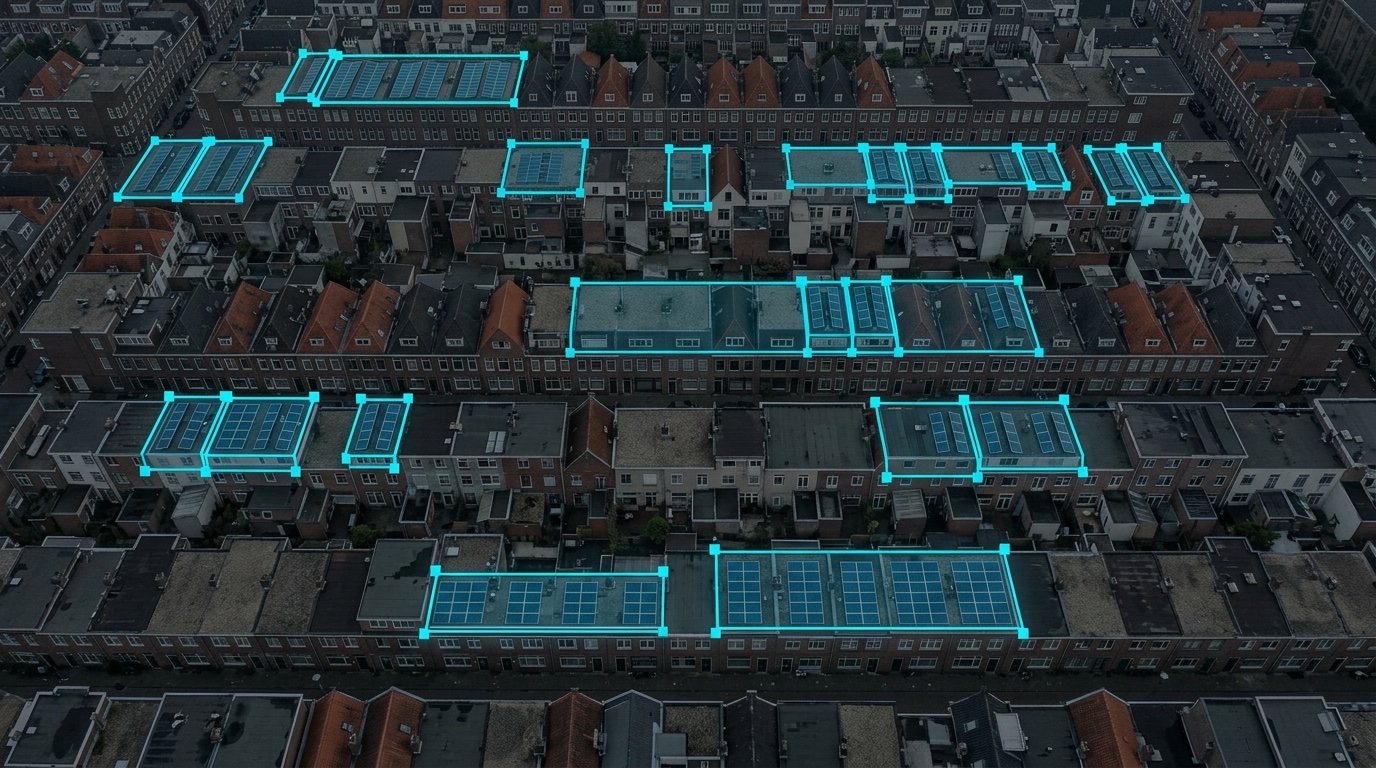
Zonnepaneeldetectie op daken bij Gemeente Rotterdam
Transfer learning met CNN-architecturen (Xception, VGG16) op luchtfoto's voor energietransitie-monitoring, koppeling met BAG en zonpotentie-berekening.
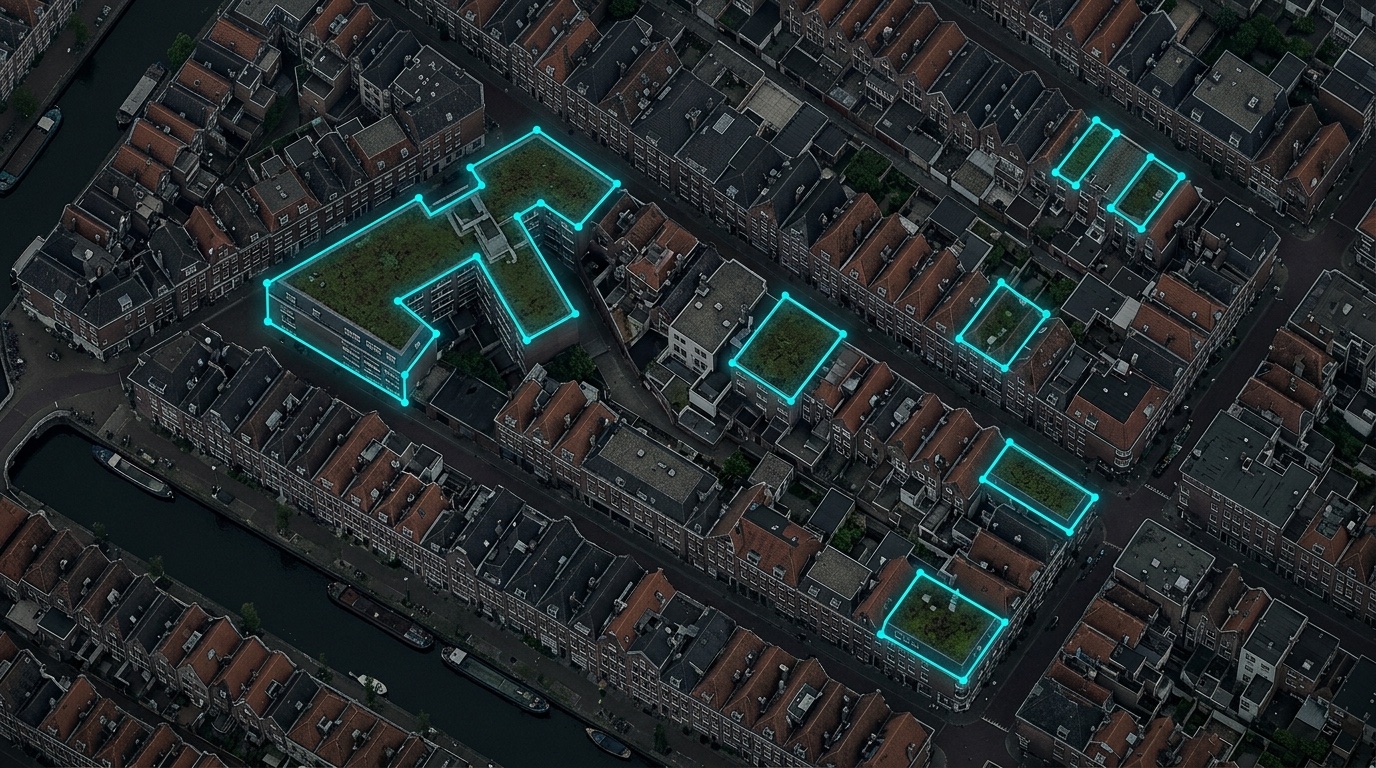
Groene daken in kaart bij Gemeente Rotterdam
Vision-AI op luchtfoto's voor de Monitor Groene Daken, semantic segmentation met U-Net op dakvlakken, gekoppeld aan BAG en AHN.
Private GenAI-chatbot bij Gemeente Rotterdam
Interne RAG-chatbot waarmee medewerkers documenten konden raadplegen, volledig binnen de eigen omgeving en compliant met de EU AI Act.